More about HKUST
Spatiotemporal Machine Learning Models for Precipitation Nowcasting
Precipitation nowcasting is the problem of giving precise and timely prediction of the rainfall intensity in a local region over a few hours based on radar echo maps, rain gauge and other weather data. It is a very important problem because it facilitates drivers by predicting road conditions, enhances flight safety by providing weather guidance for regional aviation, avoids casualties by issuing citywide rainfall alerts, among many possibilities. In addition to the inherent complexities of the atmosphere and relevant dynamical processes, the ever-growing need for real-time, large-scale, and fine-grained precipitation nowcasting poses extra challenges to the meteorological community and has aroused research interest in the machine learning community.
A simplified version of the problem is illustrated below. After receiving a sequence of radar echo maps up to the current time step, the task is to predict the radar echo maps in the next few time steps based on which rainfall intensities in specific locations can be estimated. For example, the radar maps are taken from the weather radar every six minutes.

Over the past few years, Prof. Dit-Yan Yeung and his research students have collaborated with the Hong Kong Observatory to solve the precipitation nowcasting problem using weather radar data collected in Hong Kong since 2009. By formulating precipitation nowcasting as a spatiotemporal sequence forecasting problem, they first proposed the ConvLSTM model [Shi et al., 2015] by incorporating convolutional structures in both the input-to-state and state-to-state transitions of a recurrent neural network (RNN) model. Using the radar echo data collected in Hong Kong from 2011 to 2013 for model training, ConvLSTM gives more accurate predictions than the current algorithm used by the Hong Kong Observatory which is based on estimating the optical flow.

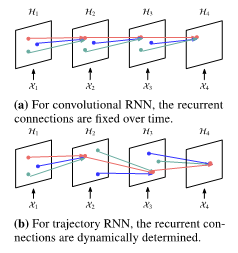
Recently, the team proposed a more general model called TrajGRU [Shi et al, 2017] which extends ConvLSTM in several important dimensions. A major extension is that TrajGRU can actively learn the location-variant structure for the recurrent connections in the RNN model and hence can handle more natural motion and transformation such as rotation. Moreover, the dataset has been extended to cover seven years, from 2009 to 2015. Because of the further improvement in prediction accuracy, the Hong Kong Observatory is currently porting the TrajGRU implementation to their online system for more thorough testing.
This collaborative project benefits both the academic researchers and the practitioners in that it has led to publications in a top machine learning conference as well as deliverables that are being incorporated into the operational system for real-world weather forecasting.
[Shi et al., 2015] Xingjian Shi, Zhourong Chen, Hao Wang, Dit-Yan Yeung, Wai-kin Wong, and Wang-chun Woo. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. Advances in Neural Information Processing Systems 28, C. Cortes, N.D. Lawrence, D.D. Lee, M. Sugiyama & R. Garnett (eds.), pp.802-810, 2015. (Twenty-Ninth Annual Conference on Neural Information Processing Systems, Montreal, Quebec, Canada, 7-12 December 2015.)
[Shi et al., 2017] Xingjian Shi, Zhihan Gao, Leonard Lausen, Hao Wang, Dit-Yan Yeung, Wai-kin Wong, and Wang-chun Woo. Deep learning for precipitation nowcasting: A benchmark and a new model. Advances in Neural Information Processing Systems 30, I. Guyon, U.V. Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan & R. Garnett (eds.), pp.5620-5630, 2017. (Thirty-First Annual Conference on Neural Information Processing Systems, Long Beach, California, USA, 4-9 December 2017.)
Navigation

Navigation

 Facebook
Facebook LinkedIn
LinkedIn Instagram
Instagram YouTube
YouTube Contact Us
Contact Us